Solution proposal - exercise 4
See the notes for reference both about the topic and the notation employed in this solution proposal.
Table of contents
Task 1 (Problem 11.1 in Gonzales and Woods)
-
Treating the chain code a circular, connected chain, it is obvious that every element corresponds to a unique starting point. Thus, by agreeing on the rule that the code should form an integer of minimum magnitude, we make the code invariant to the starting point. Note that this is somewhat arbitrary, and we could just as well use e.g. the configuration that forms the integer of maximum magnitude, as long as everyone agrees.
Task 2 (Problem 11.8 in Gonzales and Woods)
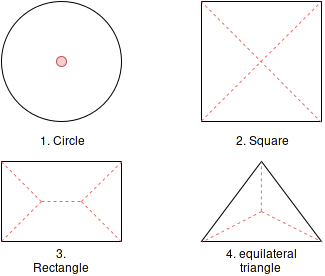
The medial axis or the skeleton of an object is defined as (see. section 11.1.7 in Gonzales and Woods).
For each point in a region , we find its closest neighbor at the boundary . If has more than one such neighbor, it is said to belong to the medial axis (skeleton) of .
The concept of closest depends on our distance metric, and a below we employ the common Euclidean distance.
Task 3 (Problem 11.9 in Gonzales and Woods)
Subtask 1
Apply Step 1 on all figures.
Figure 1
a) OK.
b) OK.
c) OK.
d) OK.
Every condition is met, so flag this point.
Figure 2
a) not OK.
b) OK.
c) OK.
d) OK.
Condition a) is not met, so keep this point.
Figure 3
a) OK.
b) not OK.
c) not OK.
d) not OK.
Only condtion a) is met, so keep this point.
Figure 4
a) OK.
b) not OK.
c) OK.
d) OK.
Condition b) is not met, so keep this point.
Subtask 2
Apply Step 2 on all figures.
Figure 1
a) OK.
b) OK.
c) OK.
d) not OK.
Condition d) is not met, so keep this point.
Figure 2
a) not OK.
b) OK.
c) OK.
d) OK.
Condition a) is not met, so keep this point.
Figure 3
a) OK.
b) not OK.
c) not OK.
d) not OK.
Only condtion a) is met, so keep this point.
Figure 4
a) OK.
b) not OK.
c) OK.
d) OK.
Condition b) is not met, so keep this point.
Task 4 - Create region objects using Python
In this task, we will find connected regions in an image and remove unwanted
objects based on information about these regions. The full source code, named
inf4300_h16_ex04_t04.py is can be found
here.
Step 0 - Some necessary imports
import numpy as np
import matplotlib.pyplot as plt
import cv2
from skimage.color import label2rgb
Step 1 - Read the image
Read the image as a grayscale image, but remember to cast it to float. The reason for this is that some of the operations we are performing later (like subtraction of images) are going to give values outside the [0, 255] range. If we had kept an unsigned integer type for our image, unexpected things could occur (and we would not necessary be warned about it).
image = cv2.imread(image_file, cv2.IMREAD_GRAYSCALE)
image = image.astype(np.float32)
Step 2 - Remove high-frequency noise
We do this by applying some blurring filter (low-pass filtering, letting the
low frequencies through, stopping high frequencies). Here are some different
blur functions in openCV you can try for both step 2 and step 3.
ksize = 5 # Some odd integer
blurred_image = cv2.blur(image, (ksize, ksize)) # Mean blur
blurred_image = cv2.GaussianBlur(image, (ksize, ksize), 0)
blurred_image = cv2.medianBlur(image, ksize)
blurred_image = cv2.biliteralFilter(imag, 9, 75, 75) # Read the docs
In this proposal, I used a Gaussian filter with kernel size 5
nr_image = cv2.GaussianBlur(image, (5, 5), 0)
Step 3 - Create background image
I found that using Gaussian filtering again worked okay, albeit with a larger kernel size.
background = cv2.GaussianBlur(nr_image, (21, 21), 0)
Step 4 - Remove background
This subtraction will center the values around zero, so we rescale the graylevels back to the [0, 255] range, and cast it back to int.
br_image = nr_image - background
br_image = 255*(br_image - np.min(br_image)) / (np.max(br_image) - np.min(br_image))
br_image = br_image.astype(np.uint8)
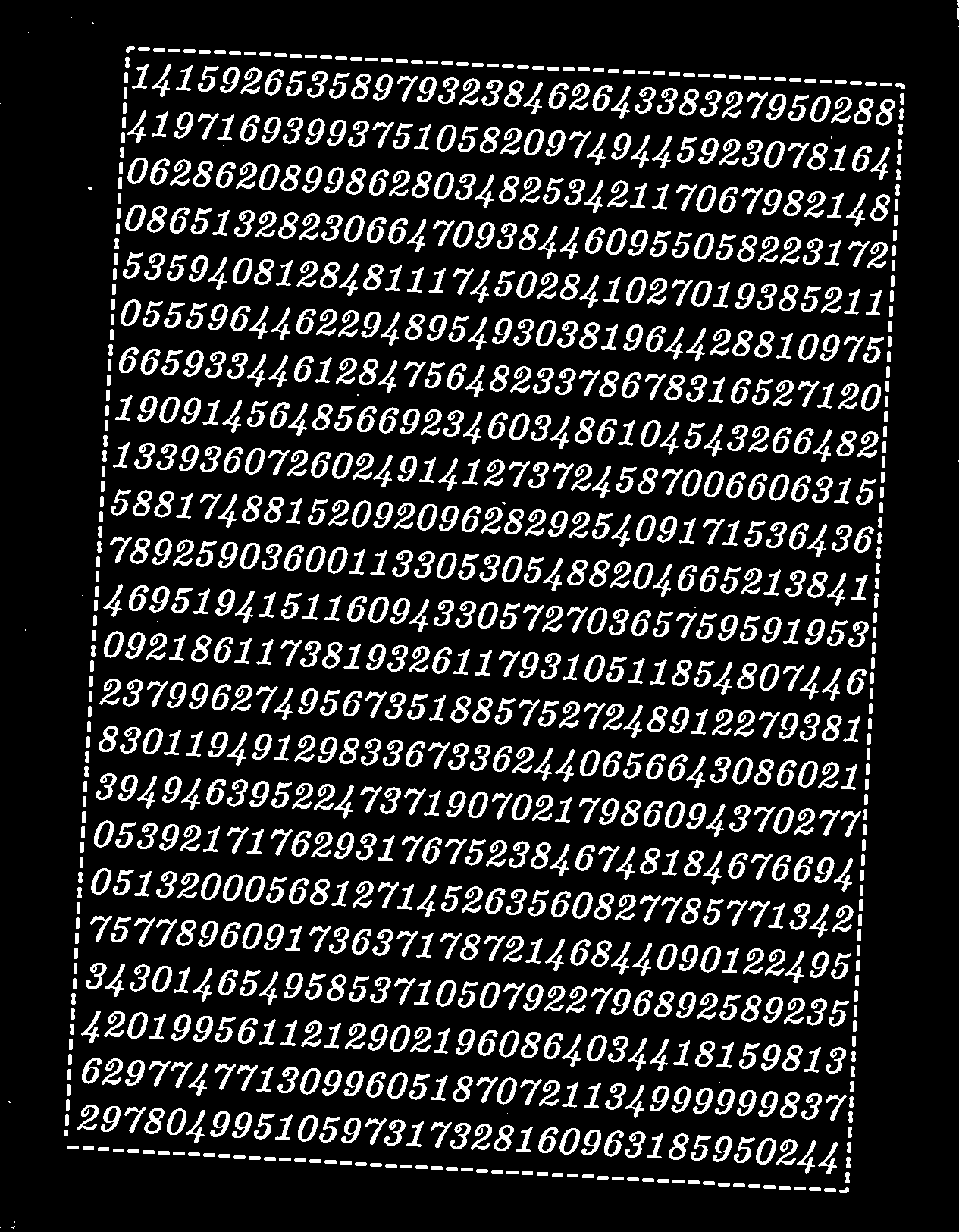
Step 5 - Threshold the image on intensity using a global threshold
Unless you are doing some automatic thresholding, it would be wise to see a distribution of the graylevels before deciding for a threshold.
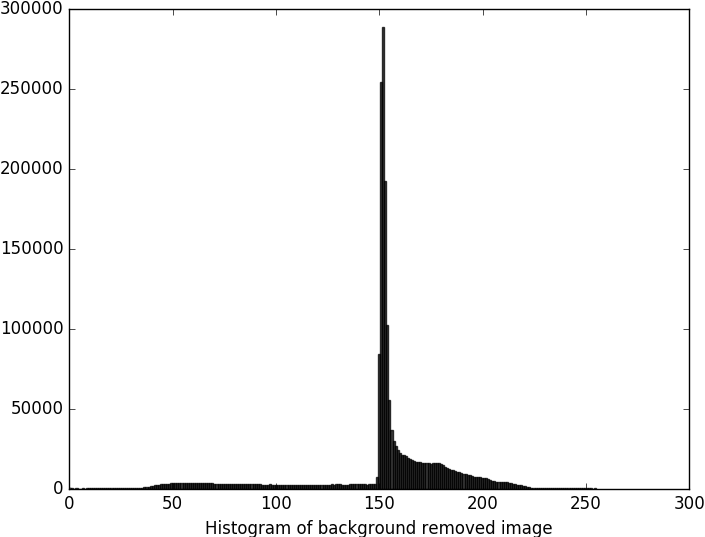
Here, we see that there is a large spike in the middle, which is recognizable as the majority of the background. Therefore we set the threshold right below this. As the interesting regions are darker than the background, we choose to “keep” the pixels with levels below this threshold. We cast the image from bool to int for later use. Note that now, the background is black, while the interesting regions are white.
threshold = 149
thr_image = (br_image < threshold).astype(np.uint8)
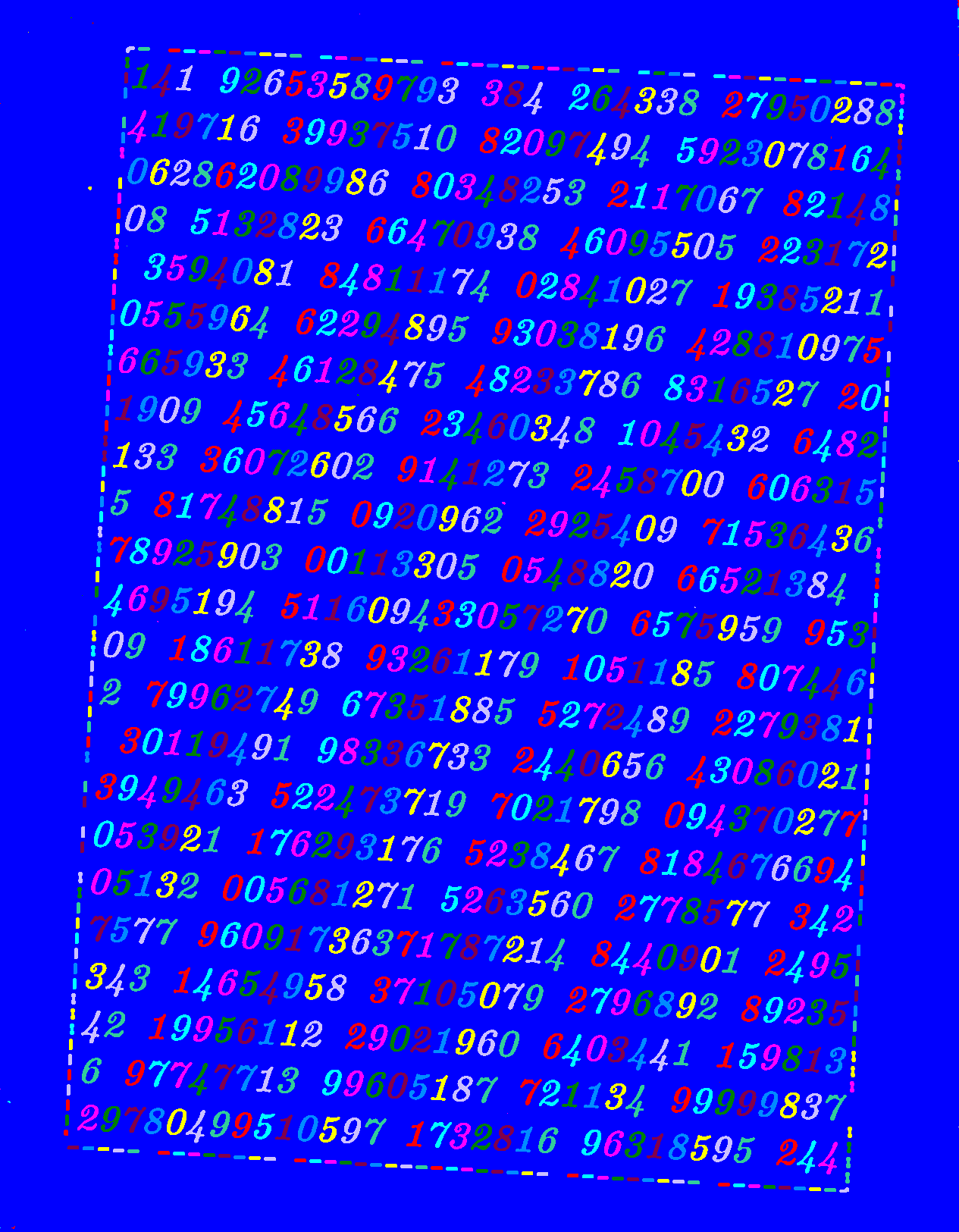
Step 7 - Compute region objects and labels
Here, we are using a handy function that labels all connected regions with a unique label, and in addition, collects some useful information about the regions.
connectivity = 4
output = cv2.connectedComponentsWithStats(thr_image.astype(np.uint8),
connectivity,
cv2.CV_32S)
num_labels = output[0]
label_image = output[1] # Image with a unique label for each connected region
stats = output[2]
centroids = output[3] # Centroid indices for each connected region
Most interesting to us is the label_image and stats. The label_image is
an array of the same shape as the input array, where each connected region has
has a unique label.
The stats output is an array, where for each connected component, the
following information is computed
stats[:, 0]: The leftmost coordinate which is the inclusive start of the bounding box in the horizontal direction.stats[:, 1]: The topmost coordinate which is the inclusive start of the bounding box in the vertical direction.stats[:, 2]: The horizontal size of the bounding box.stats[:, 3]: The vertical size of the bounding box.stats[:, 4]: The total area (in pixels) of the connected component.
Step 8 - Use information about region to remove noise and the frame
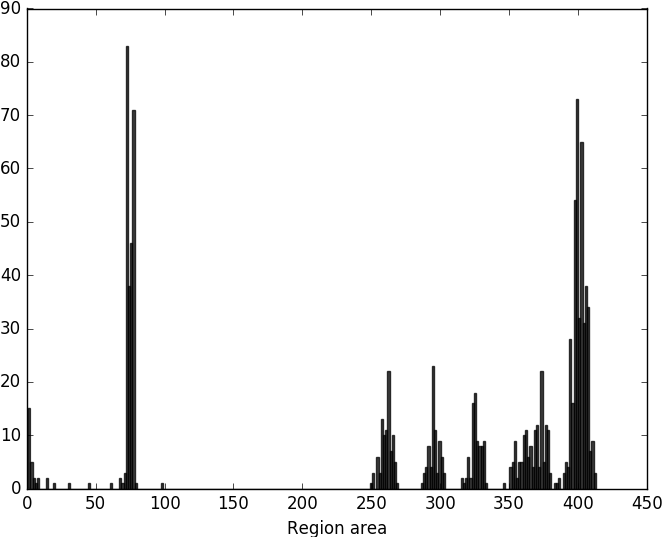
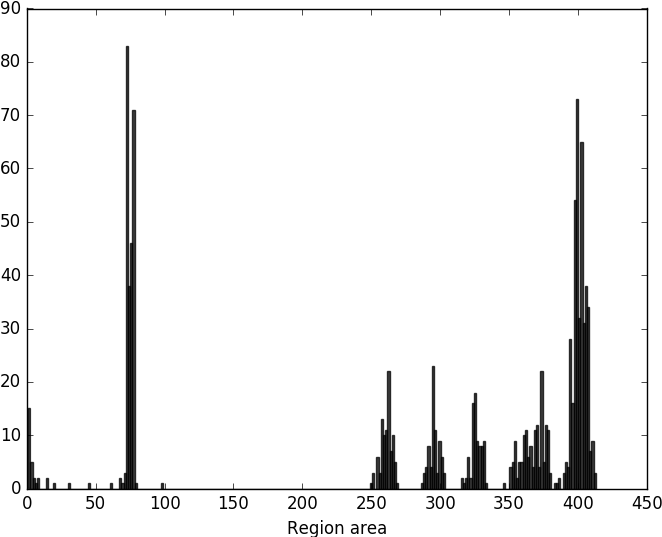
First, we plot the histogram based on region area. Note that we slice away the first index since this correspond to the background label (and has thus a quite huge area compared to the other regions, which will mask our results).
region_area = stats[1:, 4]
We can also create a scatterplot of the region area and the bounding box area, this will give us yet another view of the area distribution. It could be argued that the information added by the bounding box area is redundant, but the idea that you can use a scatterplot to visualize distributions of different qualities is instructive.
bbox_area = stats[1:, 2] * stats[1:, 3]
Finally, we use the gathered information to highlight different labels. Here we only use region area information.
region_area = stats[:, 4]
lower_threshold = 200
upper_threshold = 450
keep_labels = np.where(np.logical_and(stats[:, 4] > lower_threshold,
stats[:, 4] < upper_threshold))
keep_label_image = np.in1d(label_image, keep_labels).reshape(label_image.shape)
ra_thr_image = np.copy(thr_image)
ra_thr_image[keep_label_image] = 255
ra_thr_image[keep_label_image == False] = 0
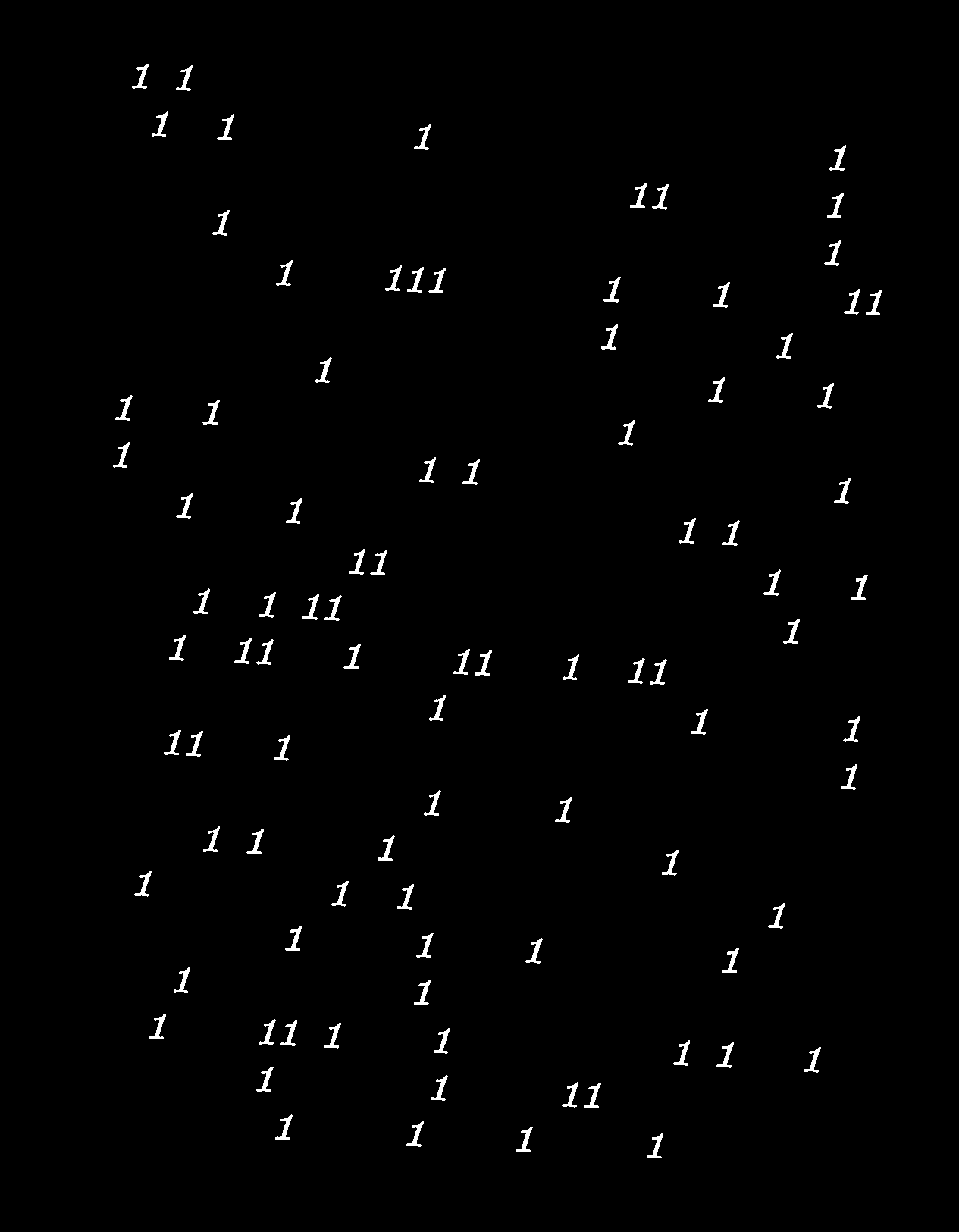
With the region area, we can easily filter out the noisy particles, and also discriminate between the frame and the numbers.
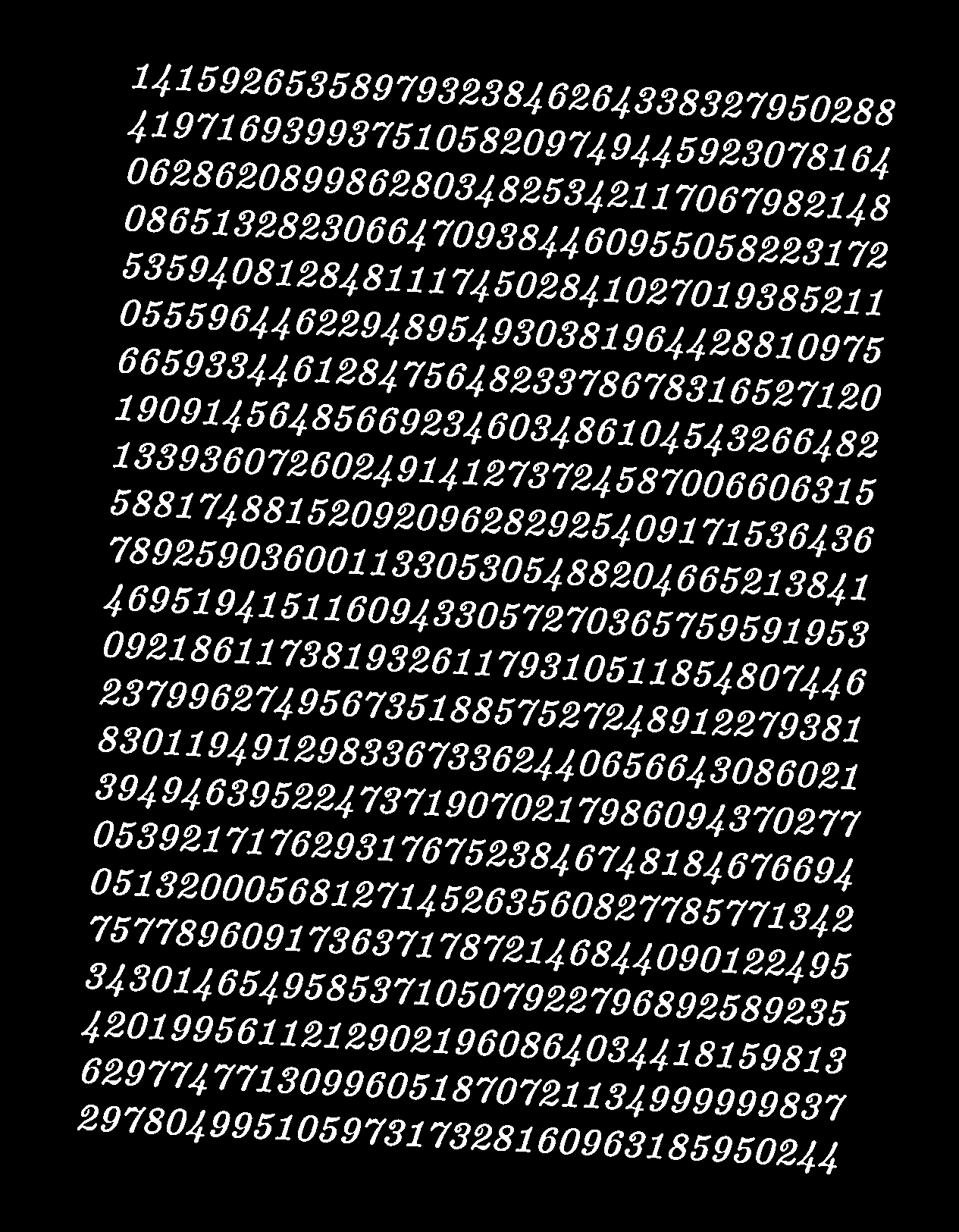
It is also easy to find ones, and the sevens,
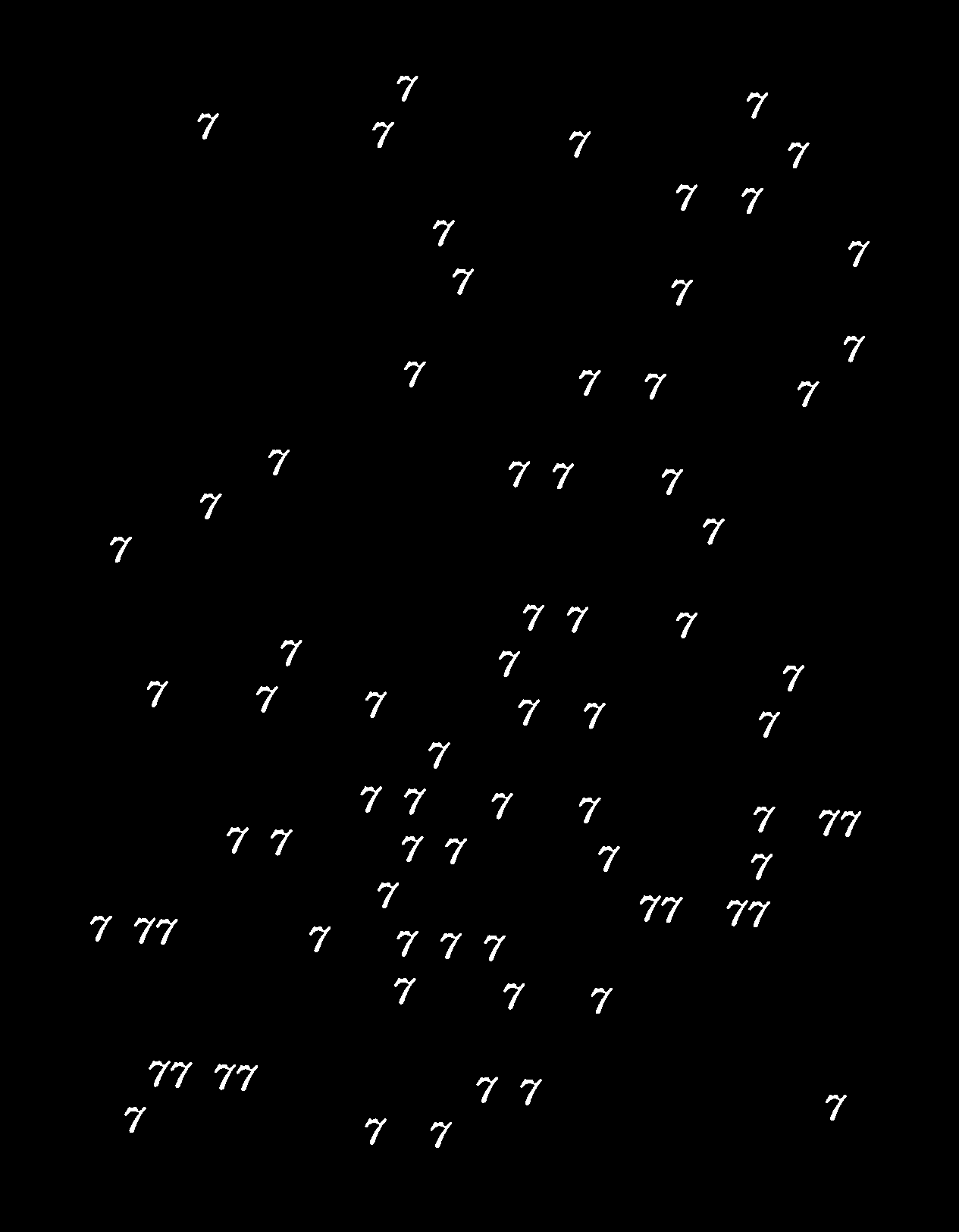
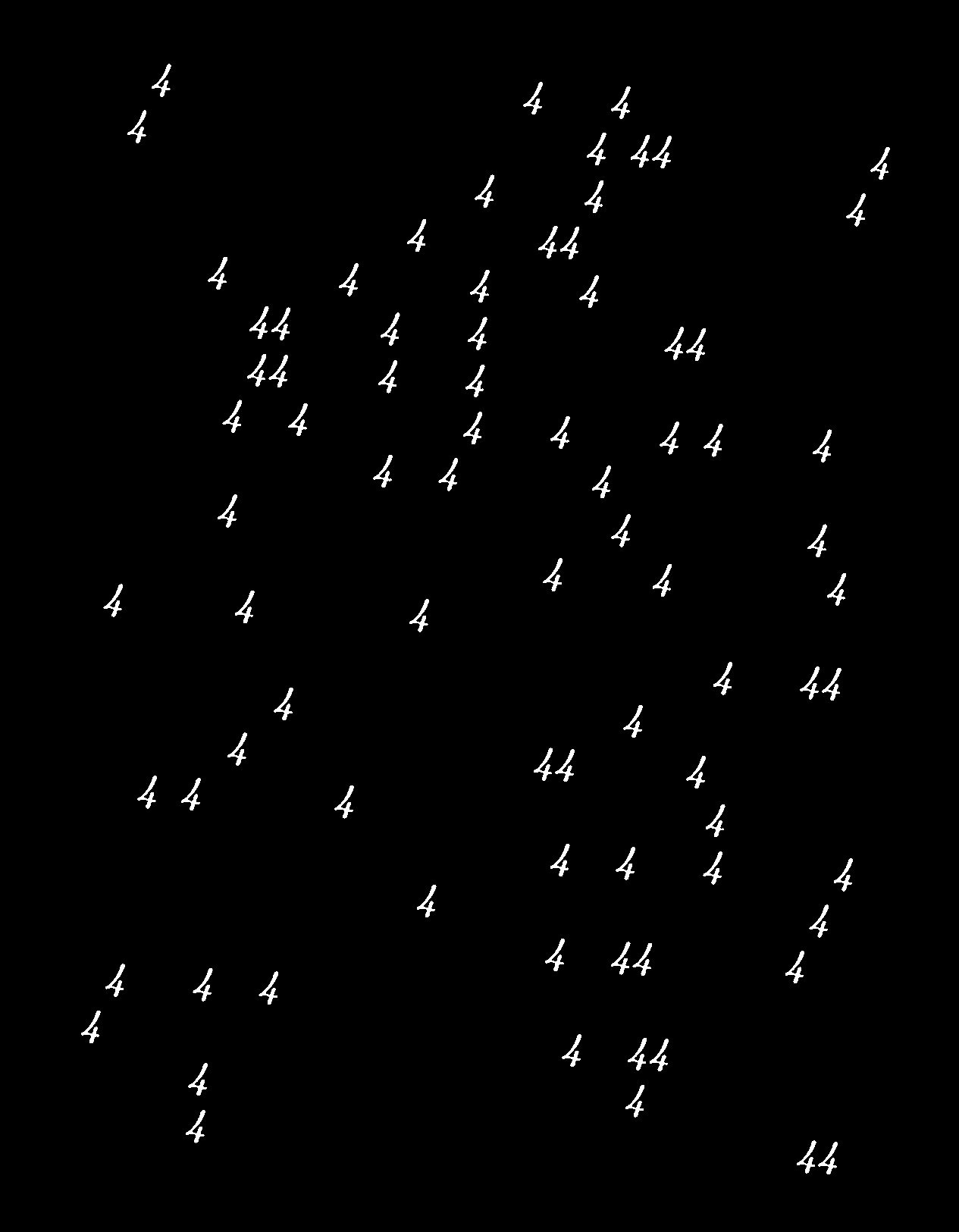
and even the fours. However, the rest seems a bit challenging using only region area information. In the right image are all threes and fives, but also one nine.
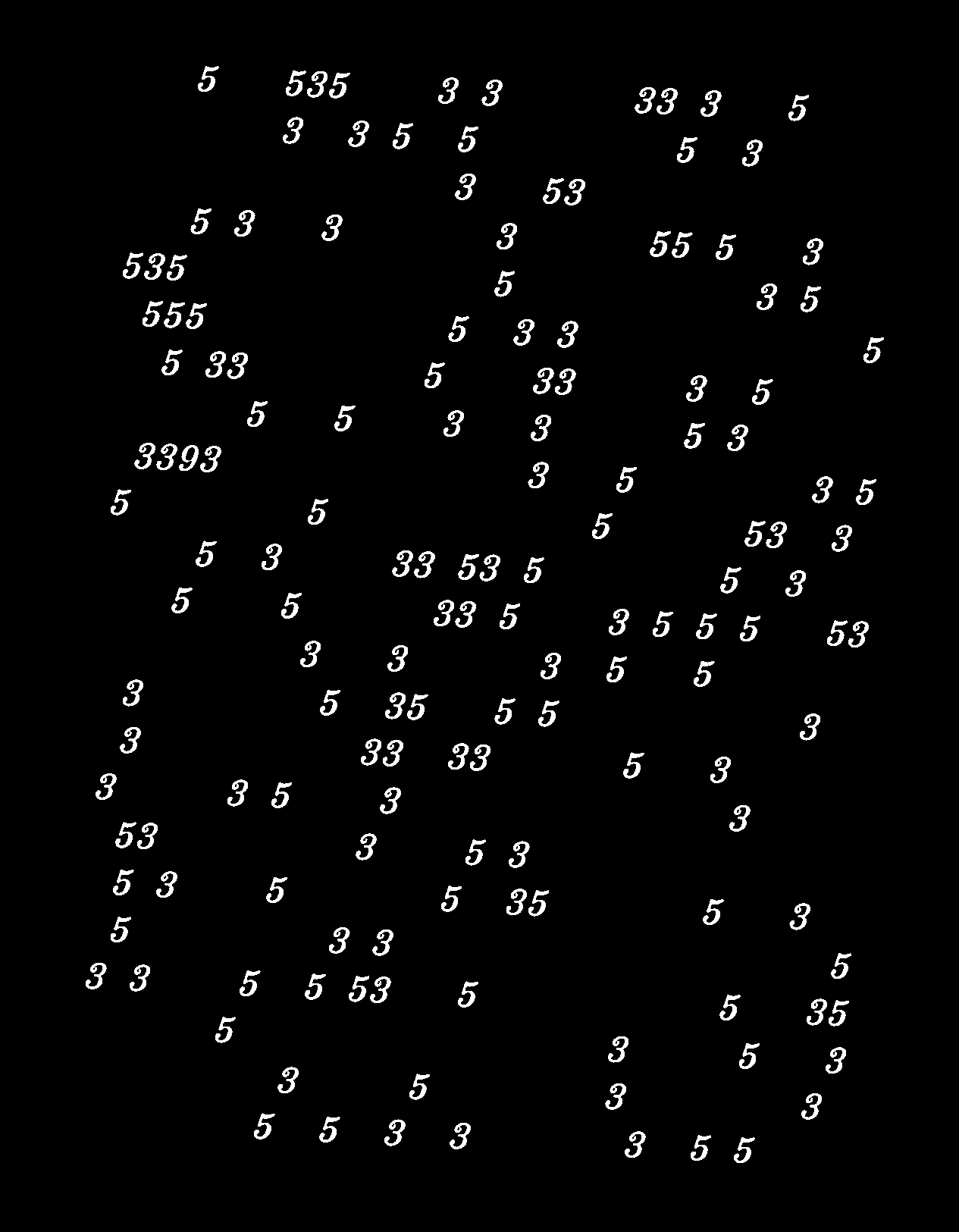
The final group in the histogram contains all the eights, zeros, twos and rest of the nines.
Task 5 - Exercise 1 from 2011 exam: chain codes
-
Starting from the lower left pixel
-
We can apply minimum circular shift to make the chain code invariant to starting position. Applied on the code obtained from starting at the lower left pixel of the object “”
And then, the same applied to the chain code obtained from starting at the top pixel of the object “”
-
Relative chain code is already rotation invariant, so we only need to apply starting point normalization. Starting at the upper left pixel of the rotated object “V” (remembering to substitute the first number since this is relative chain code), and using 0 as the forward direction, yields
We can check this by applying rotation normalization to the code obtained from the -shaped object.
Task 6 - Exercise 2 from 2012 exam: chain codes
-
Starting from the upper left pixel (at [0, 1])
-
Applying minimum circular shift will make the code invariant to starting position (also apply rotation normalization for reference in step 3.)
Compare with the result obtained when starting from the lower right pixel (at position [4, 2]).
-
Applying first difference on the chain code, and then normalizing it for starting point will make the code rotation invariant.
Rotated object, starting from upper left (at [0, 2])
Rotated object, starting from lower right (at [4, 3])
Compare it to the results obtaned in step 2. to see that they are equal.